Other Projects
A selection of other projects and papers I’ve either written myself or contributed to.

Autonomous Vehicle Tracking
This project focused on developing a speed controller and two different steering controllers for NIKI, the autonomous Volkswagen GTI owned by Stanford University. I focused on implementing a continuous time LQR for steering control of the vehicle. Instead of using the built in Matlab functions, I manually coded the Ricatti Recursion and solved using an ODE solver. Longitudinal speed control was handled by a feedforward controller which takes into account terrain grade, rolling resistance, and vehicle drag. The other steering controller was a lookahead controller with feedforward. Lookahead gain and distance were tuned via root locus and simulator results to meet performance parameters. [PDF]

Multiple Autonomous Underwater Vehicle Tracking in a Low Communication Environment
In this paper, we look at multiple autonomous underwater vehicles tracking a target (a shark) with uncertain communication between the robots. We model these robots with realistic dynamics based on the Cornell University 2019 competition vehicle. We are able to successfully maintain formation around a moving target by utilizing Extended Kalman Filters to estimate robot positions when communication is lost within the network.The target tracking is stable in simulation when the target rapidly changes speed and direction. Some stability is lost in the formation when the speed of the target is large or when the number of robots exceeds six [PDF]

Real Time Trajectory Replanning
Trajectory planning for vehicles at the limit of friction is a problem of particular interest to autonomous vehicle design. Being able to quickly plan a new trajectory in an emergency scenario has the potential to save lives. For this project, my team chose to re-implement the algorithm used in “Real-Time Trajectory Replanning for Autonomous Driving”. In this paper, the authors outline an algorithm that allows a racing vehicle to avoid an obstacle while the vehicle is at the limits of its handling abilities. Using a low level controller developed in ME227, Vehicle Dynamics and Control, we solved an optimal control problem using Sequential Convex Programming (SCP) and the CVX framework in Matlab. Our preliminary results show our adapted algorithm is able to replan a trajectory around an obstacle which is then tracked using our low level controller. [PDF]
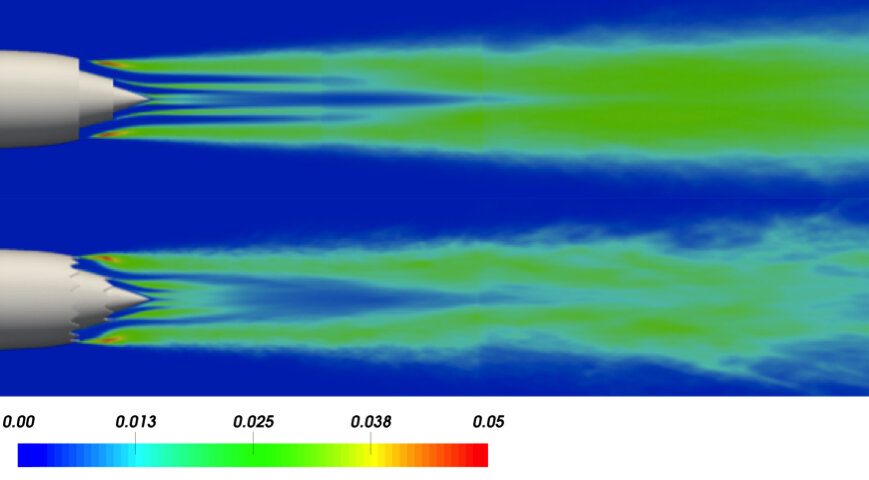
Laminar Flow Control
For supercritical transport category aircraft flying at cruise, skin friction drag can represent more than 50% of the total drag on the aircraft. This is a result of the majority turbulent flow from the leading edge of the wing back. Laminar Flow Control is a technology by which you actively control the boundary layer with suction to delay the transition from laminar to turbulent flow in order to reduce the skin friction. While the principles of this tech have been studied on various aircraft, one auto company, Gordon Murray Design is hoping to use the principles of Laminar Flow Control to provide their new supercar a performance edge. In this paper, I’ll examine the history and principles of Laminar Flow Control, detailing the hurtles traversed throughout its development before investigating the claims made by Gordon Murray Automotive’s T.50 supercar and its unique aerodynamic configuration. [PDF]

Spikeball Playing Robot
For Stanford’s 2020 CS225A: Experimental Robotics class, my project team decided to simulate a game of Spikeball. Because of COVID-19 restriction, instead of playing this game in real life, we simulated the gameplay inside of the SAI2 Robotics Simulation Environment developed at Stanford. Four 7-degree of freedom Panda Robotic Arms hold flat plates which they use to direct and hit the ball to either their teammate robot or to spike the other team. Videos of this simulation running and more information can be found here.
Aircraft Noise Reduction Technologies
In this report, we survey the field of aircraft noise reduction. We first define why this is a key public health issue, before looking at the key causes, current noise reduction technologies, and finally what technologies and techniques we expect to see adopted in the future. We conclude with a look forward at how aircraft manufactures intend to use emerging tech to meet increasingly stringent international aircraft noise regulations while meeting sometimes conflicting goals for increased efficiency. [PDF]

Hybrid Rocket Design
For the Stanford ME140 Rocket Project, each team was tasked with designing a hybrid rocket to maximize either total impulse or specific impulse. Our team of four decided to compete for specific impulse. In the end our team places second in the competition with an Isp max of 166.0. You can find a more detailed writeup about our design process for the fuel grains and nozzle here. A fun fact is that one of the fuel grains used to power this rocket is found in the time capsule for the Stanford Class of 2019, now found underground in the Stanford Main Quad.